Abstract
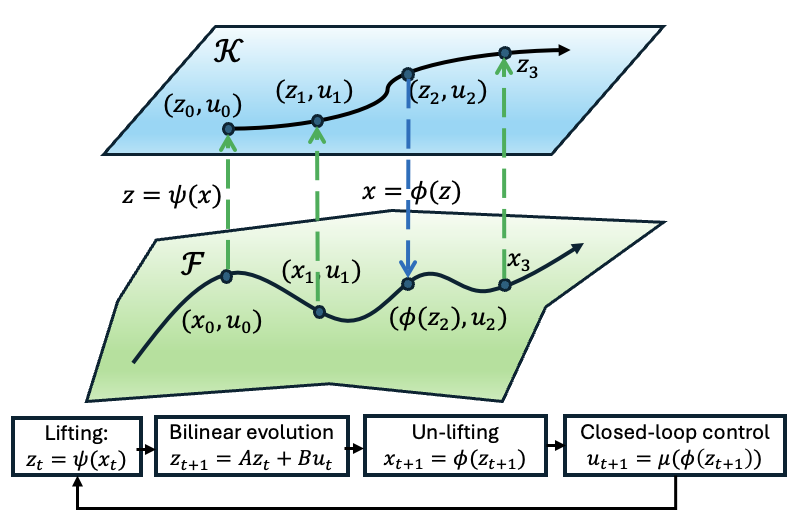
This paper introduces a data-driven model-free optimal-control approach built on deep neural network learning of Koopman representations. The method learns lifting functions directly from data and performs controller synthesis without explicit analytical models. Demonstrations on classic OpenAI Gym control environments validate the approach.
Proposed method
Citation
Han, Yiqiang, Wenjian Hao, and Umesh Vaidya. 2020. "Deep learning of Koopman representation for control." Proceedings of the 59th IEEE Conference on Decision and Control (CDC), 1890-1895.
@inproceedings{YHan2020deeplear,
author = {Y Han, W Hao, U Vaidya},
year = {2020},
title = {Deep learning of Koopman representation for control},
booktitle = {Proceedings of the 59th IEEE Conference on Decision and Control (CDC), 1890-1895},
url = {https://ieeexplore.ieee.org/iel7/9303728/9303729/09304238.pdf}
}