Short Biography
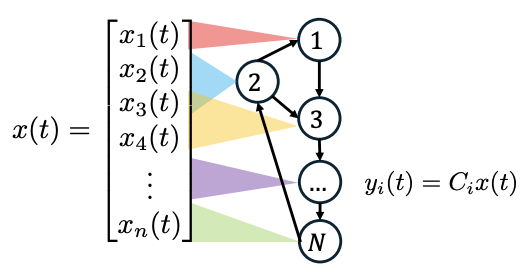
I am a Ph.D. candidate in the School of Aeronautics and Astronautics at Purdue University, advised by Dr. Shaoshuai Mou. My research focuses on learning-based control for autonomous robots; data-driven modeling of nonlinear dynamics using globally linear representations; data-efficient reinforcement learning; optimal, safety-critical, and sampling-based control; and multi-agent systems.