Abstract
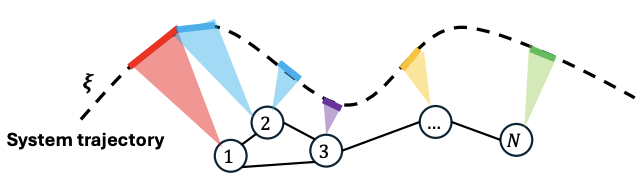
This paper introduces distributed deep Koopman learning using partial trajectories for multi-agent dynamics learning. Each agent learns local Koopman dynamics from private trajectories and exchanges model estimates (not raw data) to reach consensus on a global model. Integrated with model predictive control, the learned model supports goal-tracking and station-keeping with good accuracy in simulation.
Proposed method
Citation
Hao, Wenjian, Zehui Lu, Devesh Upadhyay, and Shaoshuai Mou. 2024. "Distributed Koopman Learning using Partial Trajectories for Control." arXiv preprint arXiv:2412.07212.
@techreport{WHao2024distribu,
author = {W Hao, Z Lu, D Upadhyay, S Mou},
year = {2024},
title = {Distributed Koopman Learning using Partial Trajectories for Control},
number = {arXiv:2412.07212},
url = {https://arxiv.org/pdf/2412.07212}
}