Papers
Learning-Based Control for Robotics
This paper presents an online model-based reinforcement learning framework that combines learned linear Koopman dynamics with actor-critic policy optimization for efficient control of nonlinear robotic systems.
2026 · [PDF]
This paper presents an efficient MPPI control framework using learned linear Koopman dynamics to reduce rollout cost while maintaining control performance.
This paper formulates policy adaptation as constrained optimization and uses control barrier functions to guarantee objective-preserving adaptation.
This paper presents a data-driven actor-critic Koopman framework for closed-loop optimal control of systems with unknown dynamics.
This paper develops a model-free control pipeline using deep Koopman representations learned directly from interaction data.
Dynamics Learning for Complex Systems
This paper proposes deep Koopman learning for nonlinear time-varying systems with error analysis and computationally efficient prediction.
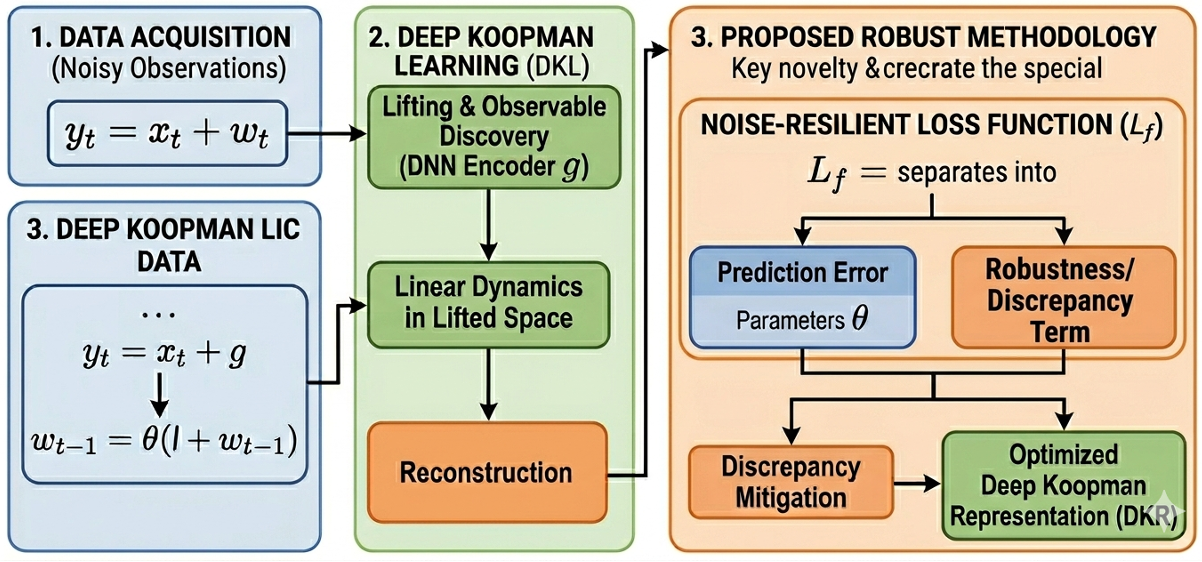
This paper develops deep Koopman learning under bounded measurement noise by explicitly modeling and mitigating noise effects during training.
Distributed Learning and Multi-Agent Systems
This paper proposes distributed deep Koopman learning with partial trajectories, allowing consensus dynamics learning without sharing private training data.
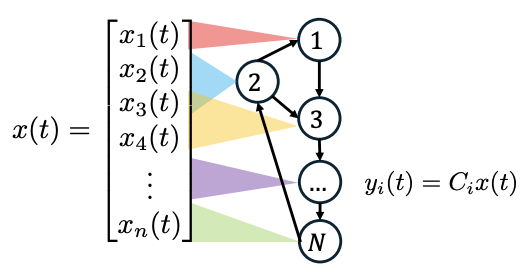
This paper develops distributed Koopman learning for networks with partial observations, enabling cooperative global dynamics reconstruction.